Комментарии отсутствуют
Информация о видео
Другие видео канала
 Mechanical Packaging Machine
Mechanical Packaging Machine Training Robot
Training Robot Egocentric Visual Self-Modeling for Autonomous Robot Dynamics Prediction and Adaptation
Egocentric Visual Self-Modeling for Autonomous Robot Dynamics Prediction and Adaptation Columbia University Robotics Studio (Bipedal Robot)
Columbia University Robotics Studio (Bipedal Robot) Bipedal Robot Locomotion
Bipedal Robot Locomotion Knolling Bot: Learning Robotic Object Arrangement from Tidy Demonstrations
Knolling Bot: Learning Robotic Object Arrangement from Tidy Demonstrations A Legged Robot Learned to walk in Pybullet (Deep Reinforcement Learning)
A Legged Robot Learned to walk in Pybullet (Deep Reinforcement Learning) Training a Legged Robot to walk by Deep Reinforcement Learning
Training a Legged Robot to walk by Deep Reinforcement Learning Reconfigurable Robot Identification from Motion Data
Reconfigurable Robot Identification from Motion Data Legged Robot Wave
Legged Robot Wave Knolling bot 2.0: Enhancing Object Organization with Self-supervised Graspability Estimation.
Knolling bot 2.0: Enhancing Object Organization with Self-supervised Graspability Estimation. Walking Challenge for Bipedal Robot (Deep RL Algorithm)
Walking Challenge for Bipedal Robot (Deep RL Algorithm) Battery holder
Battery holder Hardware Design
Hardware Design Leg Modularity demonstrated
Leg Modularity demonstrated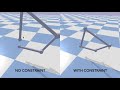 Create Constraint in Pybullet (Four-bar Kinematic Loop)
Create Constraint in Pybullet (Four-bar Kinematic Loop) Generative Design (Desk & Chair)
Generative Design (Desk & Chair) Robot Studio (Forbiddence)
Robot Studio (Forbiddence) Evolved Robot
Evolved Robot Run Away From Here
Run Away From Here