Hybrid Position/Force Control for Biped Robot Stabilization with Integrated Center of Mass Dynamics
In this video we show the performance of a new force control approach for our humanoid LOLA. By using an explicit contact model and integrated CoM dynamics, we are able to walk from an unexpected platform of 5.5 cm height.
Check out our open source repositories!
https://github.com/am-lola
Check out our paper!
http://mediatum.ub.tum.de/node?id=1394924
Видео Hybrid Position/Force Control for Biped Robot Stabilization with Integrated Center of Mass Dynamics канала TUM Chair of Applied Mechanics
Check out our open source repositories!
https://github.com/am-lola
Check out our paper!
http://mediatum.ub.tum.de/node?id=1394924
Видео Hybrid Position/Force Control for Biped Robot Stabilization with Integrated Center of Mass Dynamics канала TUM Chair of Applied Mechanics
Показать
Комментарии отсутствуют
Информация о видео
23 июля 2017 г. 16:46:12
00:01:18
Другие видео канала
 Impedance Control vs. Position Control
Impedance Control vs. Position Control NABiRoS: Non Anthropomorphic Bipedal Robotic System
NABiRoS: Non Anthropomorphic Bipedal Robotic System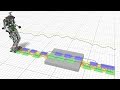 Smooth Real-Time Walking-Pattern Generation for Humanoid Robot LOLA
Smooth Real-Time Walking-Pattern Generation for Humanoid Robot LOLA Impedance Control for Soft Robots
Impedance Control for Soft Robots Impedance Control Demo with a 7-DOF Robot Arm
Impedance Control Demo with a 7-DOF Robot Arm LIMS2-AMBIDEX mechanical design
LIMS2-AMBIDEX mechanical design Balancing Robot
Balancing Robot LEONARDO Bipedal Robot with Thrusters
LEONARDO Bipedal Robot with Thrusters Dynamic Walking - Online Gait Pattern Regeneration for Bipedal Robots
Dynamic Walking - Online Gait Pattern Regeneration for Bipedal Robots stairs climbing robot
stairs climbing robot 10 Amazing Robots That Really Exist
10 Amazing Robots That Really Exist Deep Compliant Control (SIGGRAPH 2022)
Deep Compliant Control (SIGGRAPH 2022) DENSO and ATI Demonstrate Robotic Force Control For Electrical Assembly
DENSO and ATI Demonstrate Robotic Force Control For Electrical Assembly Tunable Variable Stiffness
Tunable Variable Stiffness MIT Physics Demo -- Center of Mass Trajectory
MIT Physics Demo -- Center of Mass Trajectory Whole-body compliant control of iCub with OpenSoT
Whole-body compliant control of iCub with OpenSoT Humanoid Robot LOLA - Vision Guided Autonomous Multi-Contact Locomotion
Humanoid Robot LOLA - Vision Guided Autonomous Multi-Contact Locomotion Humanoid Robot LOLA – Dynamic Multi-Contact Locomotion
Humanoid Robot LOLA – Dynamic Multi-Contact Locomotion Hello Robot x7 : BB-8, RC Robot Fight, Biped Robots
Hello Robot x7 : BB-8, RC Robot Fight, Biped Robots Lecture 4: Quadrotor Dynamics
Lecture 4: Quadrotor Dynamics