Lecture 4: Quadrotor Dynamics
This video talks about the quadrotor dynamics/physics for CMSC828T: Vision, Planning and Control in Aerial Robotics course at the University of Maryland, College Park.
Видео Lecture 4: Quadrotor Dynamics канала PRG UMD Teaching
Видео Lecture 4: Quadrotor Dynamics канала PRG UMD Teaching
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
 PythonOOP
PythonOOP Class 14 SfM II
Class 14 SfM II ENAE788M: Class 2 Part 1: Rigid Body Transformations and Rotations
ENAE788M: Class 2 Part 1: Rigid Body Transformations and Rotations Lecture 1 Part 1: Course Logistics
Lecture 1 Part 1: Course Logistics Class 3 Part 1 - Quadrotor Hardware
Class 3 Part 1 - Quadrotor Hardware Class 9: Quadrotor HW
Class 9: Quadrotor HW Class 8 - Cameras, Image Formation, GMM
Class 8 - Cameras, Image Formation, GMM Class 10 - Features in Computer Vision
Class 10 - Features in Computer Vision ENAE788M: Class 1 Introduction
ENAE788M: Class 1 Introduction Class 3 Part 2 Hacking Bebop, DIY Research Quadrotor
Class 3 Part 2 Hacking Bebop, DIY Research Quadrotor ENAE788M: Class 2 Part 2 - IMU Basics, Attitude Estimation using CF and Madgwick
ENAE788M: Class 2 Part 2 - IMU Basics, Attitude Estimation using CF and Madgwick Class 6 - Quadrotor Dynamics
Class 6 - Quadrotor Dynamics Class 7 - Quadrotor Controls
Class 7 - Quadrotor Controls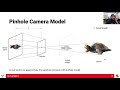 Class 11 - Camera Models
Class 11 - Camera Models Lecture 8: Trajectory Planning
Lecture 8: Trajectory Planning Lecture 5: Quadrotor Controls
Lecture 5: Quadrotor Controls Class 4 - Bayes Filter, Kalman Filter
Class 4 - Bayes Filter, Kalman Filter Class 5 - Extended Kalman Filter and Unscented Kalman Filter
Class 5 - Extended Kalman Filter and Unscented Kalman Filter Lecture 1 Part 2: Motion Planning
Lecture 1 Part 2: Motion Planning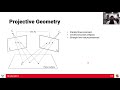 Class 12 - Projective Transformations
Class 12 - Projective Transformations