V2T2A Jan 2020: Mini two-wheels self-balancing robot with humanoid upper body
This is an experimental small robot that I completed in March 2018 (https://youtu.be/R6i-xSrRCec). Spend the next 1.5 years to further the theoretical understanding of the design and improve on the overall system. So far the machine is much more stable that the initial version. This robot is 26cm in height and weights close to 0.8kg. In this video I demonstrate the robot's machine vision module fitted on the head, lifting an object around 10% of it's body weight, and overcoming small obstacles. The idea is hopefully in future to have a robot robust enough to be able to do some useful work. To enable the robot to lift the load. I had to manually add some offsets to the set point for the tilt angle of the robot for different poses like when grabbing the object and lifting the object. These offsets depends on the shape and weight of the load, i.e. how much the load changes the center of mass and moment intertia of the combined body. So it is still pretty much choreographed for now.
- The arms are 3D printed, and the design is open source. For further info, please see: https://fkeng.blogspot.com/2016/04/self-balancing-two-wheels-mobile-robot.html
- For detailed information on the theory and modelling method please see:
https://fkeng.blogspot.com/2019/03/theory-and-design-of-two-wheels-self.html
- For the machine vision module on the head please see:
https://www.youtube.com/watch?v=m4_Zu8Dx1Ik&feature=youtu.be
Видео V2T2A Jan 2020: Mini two-wheels self-balancing robot with humanoid upper body канала fkungms
- The arms are 3D printed, and the design is open source. For further info, please see: https://fkeng.blogspot.com/2016/04/self-balancing-two-wheels-mobile-robot.html
- For detailed information on the theory and modelling method please see:
https://fkeng.blogspot.com/2019/03/theory-and-design-of-two-wheels-self.html
- For the machine vision module on the head please see:
https://www.youtube.com/watch?v=m4_Zu8Dx1Ik&feature=youtu.be
Видео V2T2A Jan 2020: Mini two-wheels self-balancing robot with humanoid upper body канала fkungms
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
 This is Ascento 2
This is Ascento 2 Arduino Project-Self Balancing Robot
Arduino Project-Self Balancing Robot How to make a (Mini) Boston Dynamics Handle - Self Balancing Robot with Arduino and Raspberry Pi
How to make a (Mini) Boston Dynamics Handle - Self Balancing Robot with Arduino and Raspberry Pi 2014 All Japan Micromouse Contest RoboTracer CartisX04 Run
2014 All Japan Micromouse Contest RoboTracer CartisX04 Run This Robot Drives on Wobbly Wheels (but HOW?)
This Robot Drives on Wobbly Wheels (but HOW?) Balancing robot video 3 - Obstacle avoidance behaviour
Balancing robot video 3 - Obstacle avoidance behaviour two axis reaction wheels balancing
two axis reaction wheels balancing Two-wheels Self-balancing Robot Using Stepper Motors (V0.98S)
Two-wheels Self-balancing Robot Using Stepper Motors (V0.98S) Building a Two-Wheel Balancing Robot | with LG XBOOM Go Speakers
Building a Two-Wheel Balancing Robot | with LG XBOOM Go Speakers АРС - Шагающий поисково-спасательный робот
АРС - Шагающий поисково-спасательный робот M5Stack BALA self-balancing robot
M5Stack BALA self-balancing robot Moment Exchange Unicycle Robot
Moment Exchange Unicycle Robot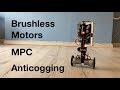 A New Take on the Inverted Pendulum Robot
A New Take on the Inverted Pendulum Robot Arduino Unboxing: Self-Balancing Robot Kit ELEGOO Tumbller
Arduino Unboxing: Self-Balancing Robot Kit ELEGOO Tumbller DIY Autonomous Car Racing with NVIDIA Jetson
DIY Autonomous Car Racing with NVIDIA Jetson Diy self balancing robot arduino based.
Diy self balancing robot arduino based. RC Robot 4x4 _ 200 lb Rc Robot
RC Robot 4x4 _ 200 lb Rc Robot Unicycle: Phase2: Full balance on bed.
Unicycle: Phase2: Full balance on bed. self balancing with reaction wheel
self balancing with reaction wheel How to make Arduino robot SMARS
How to make Arduino robot SMARS