- Популярные видео
- Авто
- Видео-блоги
- ДТП, аварии
- Для маленьких
- Еда, напитки
- Животные
- Закон и право
- Знаменитости
- Игры
- Искусство
- Комедии
- Красота, мода
- Кулинария, рецепты
- Люди
- Мото
- Музыка
- Мультфильмы
- Наука, технологии
- Новости
- Образование
- Политика
- Праздники
- Приколы
- Природа
- Происшествия
- Путешествия
- Развлечения
- Ржач
- Семья
- Сериалы
- Спорт
- Стиль жизни
- ТВ передачи
- Танцы
- Технологии
- Товары
- Ужасы
- Фильмы
- Шоу-бизнес
- Юмор
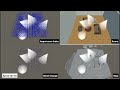
Coverage-Recon Simulation (Single Drone, Map Feedback, 3D Grid, Jₜₕ = 50%)
This video shows the Coverage-Recon framework applied to a single-drone simulation using map feedback.
Setup details:
- Map feedback method: 3D Grid mesh-change quantification
- Threshold: Jₜₕ = 50%
- The top view shows the simulated scene
- The middle view shows the importance index φⱼ (red = high priority, blue = low)
- The bottom view shows the reconstructed 3D map
- The importance index is updated based on mesh changes, allowing the drone to adaptively focus on under-reconstructed areas, leading to improved 3D reconstruction quality.
This simulation corresponds to Fig. 6 of our paper
“Coverage-Recon: Coordinated Multi-Drone Image Sampling with Online Map Feedback.”
Видео Coverage-Recon Simulation (Single Drone, Map Feedback, 3D Grid, Jₜₕ = 50%) канала Muhammad Hanif
Setup details:
- Map feedback method: 3D Grid mesh-change quantification
- Threshold: Jₜₕ = 50%
- The top view shows the simulated scene
- The middle view shows the importance index φⱼ (red = high priority, blue = low)
- The bottom view shows the reconstructed 3D map
- The importance index is updated based on mesh changes, allowing the drone to adaptively focus on under-reconstructed areas, leading to improved 3D reconstruction quality.
This simulation corresponds to Fig. 6 of our paper
“Coverage-Recon: Coordinated Multi-Drone Image Sampling with Online Map Feedback.”
Видео Coverage-Recon Simulation (Single Drone, Map Feedback, 3D Grid, Jₜₕ = 50%) канала Muhammad Hanif
Комментарии отсутствуют
Информация о видео
15 октября 2025 г. 12:09:34
00:01:33
Другие видео канала