Joint Elasticity Produces Energy Efficiency in Underwater Locomotion
Joint Elasticity Produces Energy Efficiency in Underwater Locomotion: Verification with Deep Reinforcement Learning
Underwater snake robots have received attention because of their unique mechanics and locomotion patterns. Given their highly redundant degrees of freedom, designing energy-efficient gait has been a main challenge for long-term autonomy of underwater snake robots. We propose a gait design method for an underwater snake robot based on deep reinforcement learning and curriculum learning. For comparison, we consider gait generated by a conventional parametric gait equation controller as the baseline. Furthermore, inspired by the joints of living organisms, we consider elasticity (stiffness) in the joints of the snake robot to verify whether it contributes to the generation of energy-efficiency in underwater gait.
We first demonstrate that the deep reinforcement learning controller can produce a more energy-efficient gait than the gait equation controller in underwater locomotion, by finding the control patterns which maximize the effect of energy-efficiency through the exploitation of joint elasticity.
In addition, appropriate joint elasticity can increase the maximum velocity achievable by a snake robot. Finally, simulation results in different liquid environments confirm that the deep reinforcement learning controller is superior to the gait equation controller and it can find adaptive energy efficient motion even the liquid environment is changed.
Видео Joint Elasticity Produces Energy Efficiency in Underwater Locomotion канала Neuro-Robotics Lab
Underwater snake robots have received attention because of their unique mechanics and locomotion patterns. Given their highly redundant degrees of freedom, designing energy-efficient gait has been a main challenge for long-term autonomy of underwater snake robots. We propose a gait design method for an underwater snake robot based on deep reinforcement learning and curriculum learning. For comparison, we consider gait generated by a conventional parametric gait equation controller as the baseline. Furthermore, inspired by the joints of living organisms, we consider elasticity (stiffness) in the joints of the snake robot to verify whether it contributes to the generation of energy-efficiency in underwater gait.
We first demonstrate that the deep reinforcement learning controller can produce a more energy-efficient gait than the gait equation controller in underwater locomotion, by finding the control patterns which maximize the effect of energy-efficiency through the exploitation of joint elasticity.
In addition, appropriate joint elasticity can increase the maximum velocity achievable by a snake robot. Finally, simulation results in different liquid environments confirm that the deep reinforcement learning controller is superior to the gait equation controller and it can find adaptive energy efficient motion even the liquid environment is changed.
Видео Joint Elasticity Produces Energy Efficiency in Underwater Locomotion канала Neuro-Robotics Lab
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
 Tower of Hanoi (Occupational Therapy Task) with Microsoft Hololens 2
Tower of Hanoi (Occupational Therapy Task) with Microsoft Hololens 2 ニューロロボティクス、東北大学 学祭模擬講義 2021
ニューロロボティクス、東北大学 学祭模擬講義 2021 Towards Robust Wheel-Legged Biped Robot System: Combining Feedforward and Feedback Control
Towards Robust Wheel-Legged Biped Robot System: Combining Feedforward and Feedback Control![[EMBC2020] Personalized Fall Risk Estimation with Kinect Two](https://i.ytimg.com/vi/yl-5B5-hX1Y/default.jpg) [EMBC2020] Personalized Fall Risk Estimation with Kinect Two
[EMBC2020] Personalized Fall Risk Estimation with Kinect Two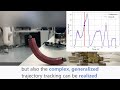 Individual deformability compensation of soft hydraulic actuators through iterative learning
Individual deformability compensation of soft hydraulic actuators through iterative learning![[EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis](https://i.ytimg.com/vi/8wGuRABPi3Q/default.jpg) [EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis
[EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis AI-CPG: Adaptive Imitated Central Pattern Generators
AI-CPG: Adaptive Imitated Central Pattern Generators Motor Synergy Development in Symmetric Gait ofWhole-body Locomotion Learning (ICRA2023 video)
Motor Synergy Development in Symmetric Gait ofWhole-body Locomotion Learning (ICRA2023 video)![[ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian](https://i.ytimg.com/vi/70DQMpIt10E/default.jpg) [ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian
[ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian 反復学習制御によるFiber-Reinforced Soft Actuatorの個体差補償
反復学習制御によるFiber-Reinforced Soft Actuatorの個体差補償 Synergetic synchronized oscillation by distributed neural integrators
Synergetic synchronized oscillation by distributed neural integrators Spiking Neural Network Discovers Energy-Efficient Hexapod Motion in Deep Reinforcement Learning
Spiking Neural Network Discovers Energy-Efficient Hexapod Motion in Deep Reinforcement Learning![[ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms](https://i.ytimg.com/vi/AxdQzhEAKgQ/default.jpg) [ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms
[ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms![[EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect](https://i.ytimg.com/vi/wPgJlwFq9VQ/default.jpg) [EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect
[EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect![[EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals](https://i.ytimg.com/vi/jea7wPxLmbc/default.jpg) [EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals
[EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals![[ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot](https://i.ytimg.com/vi/fBoAKVq2Tgo/default.jpg) [ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot
[ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot Synergetic Learning Control Paradigm for Redundant Robot to Enhance Error-Energy Index
Synergetic Learning Control Paradigm for Redundant Robot to Enhance Error-Energy Index Electromyographically Controlled Snake Robot
Electromyographically Controlled Snake Robot Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Learning
Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Learning Simultaneous On-line Motion Discrimination and Evaluation of Whole-body Exercise by Synergy Probes
Simultaneous On-line Motion Discrimination and Evaluation of Whole-body Exercise by Synergy Probes