Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Learning
Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Deep Reinforcement Learning
Keli Shen∗, Guanda Li∗, Ahmed Chemori and Mitsuhiro Hayashibe, Scientific Reports, 2023
A self-organized phenomenon in postural coordination is essential for understanding the auto-switching mechanism of in-phase and anti-phase postural coordination modes during standing and related supra-postural activities. Previously, model-based approach was proposed to reproduce such self-organized phenomenon. However, if we set this problem including the process of how we establish the internal predictive model in our central nervous system, the learning process is critical to be considered for establishing a neural network for managing adaptive postural control. Particularly when body characteristics may change due to growth or aging or are initially unknown for infants, a learning capability can improve the hyper-adaptivity of human motor control for maintaining postural stability and saving energy in living.
This study attempted to generate a self-organizing neural network that can adaptively coordinate the postural mode without assuming a prior body model regarding body dynamics and kinematics. Postural coordination modes are reproduced in head target tracking tasks through a deep reinforcement learning algorithm. The transitions between the postural coordination types, i.e. in-phase and anti-phase coordination modes, could be reproduced by changing the task condition of the head tracking target, by changing the frequencies of the moving target. These modes are considered emergent phenomena existing in human head tracking tasks. Various evaluation indices, such as correlation, and relative phase of hip and ankle joint, are analyzed to verify the self-organizing neural network performance to produce the postural coordination transition between the in-phase and anti-phase modes. In addition, after learning, the neural network can also adapt to continuous task condition changes and even to unlearned body mass conditions keeping consistent in-phase and anti-phase mode alternation.
Видео Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Learning канала Neuro-Robotics Lab
Keli Shen∗, Guanda Li∗, Ahmed Chemori and Mitsuhiro Hayashibe, Scientific Reports, 2023
A self-organized phenomenon in postural coordination is essential for understanding the auto-switching mechanism of in-phase and anti-phase postural coordination modes during standing and related supra-postural activities. Previously, model-based approach was proposed to reproduce such self-organized phenomenon. However, if we set this problem including the process of how we establish the internal predictive model in our central nervous system, the learning process is critical to be considered for establishing a neural network for managing adaptive postural control. Particularly when body characteristics may change due to growth or aging or are initially unknown for infants, a learning capability can improve the hyper-adaptivity of human motor control for maintaining postural stability and saving energy in living.
This study attempted to generate a self-organizing neural network that can adaptively coordinate the postural mode without assuming a prior body model regarding body dynamics and kinematics. Postural coordination modes are reproduced in head target tracking tasks through a deep reinforcement learning algorithm. The transitions between the postural coordination types, i.e. in-phase and anti-phase coordination modes, could be reproduced by changing the task condition of the head tracking target, by changing the frequencies of the moving target. These modes are considered emergent phenomena existing in human head tracking tasks. Various evaluation indices, such as correlation, and relative phase of hip and ankle joint, are analyzed to verify the self-organizing neural network performance to produce the postural coordination transition between the in-phase and anti-phase modes. In addition, after learning, the neural network can also adapt to continuous task condition changes and even to unlearned body mass conditions keeping consistent in-phase and anti-phase mode alternation.
Видео Self-Organizing Neural Network for Reproducing Human Postural Mode Alternation through Learning канала Neuro-Robotics Lab
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
 Tower of Hanoi (Occupational Therapy Task) with Microsoft Hololens 2
Tower of Hanoi (Occupational Therapy Task) with Microsoft Hololens 2 ニューロロボティクス、東北大学 学祭模擬講義 2021
ニューロロボティクス、東北大学 学祭模擬講義 2021 Towards Robust Wheel-Legged Biped Robot System: Combining Feedforward and Feedback Control
Towards Robust Wheel-Legged Biped Robot System: Combining Feedforward and Feedback Control![[EMBC2020] Personalized Fall Risk Estimation with Kinect Two](https://i.ytimg.com/vi/yl-5B5-hX1Y/default.jpg) [EMBC2020] Personalized Fall Risk Estimation with Kinect Two
[EMBC2020] Personalized Fall Risk Estimation with Kinect Two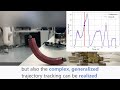 Individual deformability compensation of soft hydraulic actuators through iterative learning
Individual deformability compensation of soft hydraulic actuators through iterative learning![[EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis](https://i.ytimg.com/vi/8wGuRABPi3Q/default.jpg) [EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis
[EMBC21] Deep Reinforcement Learning with Gait Mode Specification for Trot-Gallop Analysis AI-CPG: Adaptive Imitated Central Pattern Generators
AI-CPG: Adaptive Imitated Central Pattern Generators Motor Synergy Development in Symmetric Gait ofWhole-body Locomotion Learning (ICRA2023 video)
Motor Synergy Development in Symmetric Gait ofWhole-body Locomotion Learning (ICRA2023 video)![[ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian](https://i.ytimg.com/vi/70DQMpIt10E/default.jpg) [ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian
[ICRA2020] Discovering Interpretable Dynamics by Sparsity Promotion on Energy and the Lagrangian 反復学習制御によるFiber-Reinforced Soft Actuatorの個体差補償
反復学習制御によるFiber-Reinforced Soft Actuatorの個体差補償 Synergetic synchronized oscillation by distributed neural integrators
Synergetic synchronized oscillation by distributed neural integrators Joint Elasticity Produces Energy Efficiency in Underwater Locomotion
Joint Elasticity Produces Energy Efficiency in Underwater Locomotion Spiking Neural Network Discovers Energy-Efficient Hexapod Motion in Deep Reinforcement Learning
Spiking Neural Network Discovers Energy-Efficient Hexapod Motion in Deep Reinforcement Learning![[ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms](https://i.ytimg.com/vi/AxdQzhEAKgQ/default.jpg) [ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms
[ICRA2020 video] Motor Synergy Development in High-performing Deep Reinforcement Learning algorithms![[EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect](https://i.ytimg.com/vi/wPgJlwFq9VQ/default.jpg) [EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect
[EMBC2011] Joint Angle Estimation with Inertial Sensors and its Integration with Kinect![[EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals](https://i.ytimg.com/vi/jea7wPxLmbc/default.jpg) [EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals
[EMBC2012] Real-time Simulation of Volumetric Muscle Deformation with EMG signals![[ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot](https://i.ytimg.com/vi/fBoAKVq2Tgo/default.jpg) [ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot
[ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot Synergetic Learning Control Paradigm for Redundant Robot to Enhance Error-Energy Index
Synergetic Learning Control Paradigm for Redundant Robot to Enhance Error-Energy Index Electromyographically Controlled Snake Robot
Electromyographically Controlled Snake Robot Simultaneous On-line Motion Discrimination and Evaluation of Whole-body Exercise by Synergy Probes
Simultaneous On-line Motion Discrimination and Evaluation of Whole-body Exercise by Synergy Probes