ICRA'20 Presentation LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops
This video presents "LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops" published in the IEEE Robotics and Automation Letters (RA-L) and presented at the virtual 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France.
Abstract — We present a hierarchical whole-body controller leveraging the full rigid body dynamics of the wheeled bipedal robot Ascento. We derive closed-form expressions for the dynamics of its kinematic loops in a way that readily generalizes to more complex systems. The rolling constraint is incorporated using a compact analytic solution based on rotation matrices. The non-minimum phase balancing dynamics are accounted for by including a linear-quadratic regulator as a motion task. Robustness when driving curves is increased by regulating the lean angle as a function of the zero-moment point. The proposed controller is computationally lightweight and significantly extends the rough-terrain capabilities and robustness of the system, as we demonstrate in several experiments.
paper: https://www.ascento.ethz.ch/wp-content/uploads/2020/05/LQR_Assisted_Whole_Body_Control_for_a_Wheeled_Bipedal_Robot_with.pdf
paper video: https://youtu.be/nGu2odkB5ws
project website: https://www.ascento.ethz.ch
DOI: 10.1109/LRA.2020.2979625
Chapters:
0:00 Introduction
0:30 Motivation
1:37 Modeling
3:07 Control
5:35 Balancing Robustness Experiment
5:59 Adaptive Legs Experiment
6:19 Curve Leaning Experiment
6:50 Indoor Parkour
7:12 Disturbance Rejection
7:35 Terrain Driving
7:46 More Info
Видео ICRA'20 Presentation LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops канала Ascento Robotics
Abstract — We present a hierarchical whole-body controller leveraging the full rigid body dynamics of the wheeled bipedal robot Ascento. We derive closed-form expressions for the dynamics of its kinematic loops in a way that readily generalizes to more complex systems. The rolling constraint is incorporated using a compact analytic solution based on rotation matrices. The non-minimum phase balancing dynamics are accounted for by including a linear-quadratic regulator as a motion task. Robustness when driving curves is increased by regulating the lean angle as a function of the zero-moment point. The proposed controller is computationally lightweight and significantly extends the rough-terrain capabilities and robustness of the system, as we demonstrate in several experiments.
paper: https://www.ascento.ethz.ch/wp-content/uploads/2020/05/LQR_Assisted_Whole_Body_Control_for_a_Wheeled_Bipedal_Robot_with.pdf
paper video: https://youtu.be/nGu2odkB5ws
project website: https://www.ascento.ethz.ch
DOI: 10.1109/LRA.2020.2979625
Chapters:
0:00 Introduction
0:30 Motivation
1:37 Modeling
3:07 Control
5:35 Balancing Robustness Experiment
5:59 Adaptive Legs Experiment
6:19 Curve Leaning Experiment
6:50 Indoor Parkour
7:12 Disturbance Rejection
7:35 Terrain Driving
7:46 More Info
Видео ICRA'20 Presentation LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops канала Ascento Robotics
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
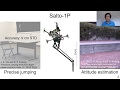 Salto-1P Leaping and Landing ICRA 2020 Presentation
Salto-1P Leaping and Landing ICRA 2020 Presentation LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops (RA-L / ICRA 2020)
LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops (RA-L / ICRA 2020) Presentation Ascento
Presentation Ascento Whole-body Motion Planning with Simple Dynamics and Full Kinematics
Whole-body Motion Planning with Simple Dynamics and Full Kinematics This is Ascento 2
This is Ascento 2 A Unified MPC Framework for Whole-Body Dynamic Locomotion and Manipulation (ICRA 2021 Presentation)
A Unified MPC Framework for Whole-Body Dynamic Locomotion and Manipulation (ICRA 2021 Presentation) Ascento Pizza Delivery
Ascento Pizza Delivery Ascento: A Two-Wheeled Jumping Robot (ICRA 2019)
Ascento: A Two-Wheeled Jumping Robot (ICRA 2019) State-of-the-art Legged Robots at the 4th ICRA 2020 Workshop in Paris (Teaser)
State-of-the-art Legged Robots at the 4th ICRA 2020 Workshop in Paris (Teaser) The Cubli: a cube that can jump up, balance, and 'walk'
The Cubli: a cube that can jump up, balance, and 'walk' This is Ascento Pro
This is Ascento Pro Ascento Fails
Ascento Fails How to Make a #VerticalFarming Tower for #Aquaponics or #Hydroponics: Part 2 www.agrowponics.com
How to Make a #VerticalFarming Tower for #Aquaponics or #Hydroponics: Part 2 www.agrowponics.com Cassie: Dynamic Planning on Stairs
Cassie: Dynamic Planning on Stairs IEEE International Conference on Robotics and Automation 2020 - Virtual Presentation
IEEE International Conference on Robotics and Automation 2020 - Virtual Presentation Introducing Stretch | Boston Dynamics
Introducing Stretch | Boston Dynamics Diy Arduino Based Self Balancing Robot | PROKNOW
Diy Arduino Based Self Balancing Robot | PROKNOW![14 Most Advanced Robots Doing Complicated Actions [Humanoid Robots, Robot Dogs And More]](https://i.ytimg.com/vi/mf2rvZ7Uv4s/default.jpg) 14 Most Advanced Robots Doing Complicated Actions [Humanoid Robots, Robot Dogs And More]
14 Most Advanced Robots Doing Complicated Actions [Humanoid Robots, Robot Dogs And More] 10 TINY Micro Robots and Nano Drones
10 TINY Micro Robots and Nano Drones Robot telekinesis (ICRA 2020) - 7 min. presentation
Robot telekinesis (ICRA 2020) - 7 min. presentation