Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control
We present a differential inverse kinematics control framework for task-space trajectory tracking, force regulation, obstacle and singularity avoidance, and pushing an object toward a goal location, with limited sensing and knowledge of the environment.
Presented at the Conference on Robots and Vision (CRV) 2021.
Researchers: Adam Heins, Michael Jakob, and Angela P. Schoellig
Paper: https://www.dynsyslab.org/wp-content/papercite-data/pdf/heins-crv21.pdf
Видео Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control канала Learning Systems and Robotics Lab
Presented at the Conference on Robots and Vision (CRV) 2021.
Researchers: Adam Heins, Michael Jakob, and Angela P. Schoellig
Paper: https://www.dynsyslab.org/wp-content/papercite-data/pdf/heins-crv21.pdf
Видео Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control канала Learning Systems and Robotics Lab
Показать
Комментарии отсутствуют
Информация о видео
20 мая 2021 г. 20:02:37
00:02:37
Другие видео канала
 IROS 2022 Safe Robot Learning Competition Awards
IROS 2022 Safe Robot Learning Competition Awards CDC21: RLO-MPC: Robust Learning-Based Output Feedback MPC for Uncertain Systems in Iterative Tasks
CDC21: RLO-MPC: Robust Learning-Based Output Feedback MPC for Uncertain Systems in Iterative Tasks ICRA 2022 Workshop Releasing Robotics into the Wild: Jens Kober
ICRA 2022 Workshop Releasing Robotics into the Wild: Jens Kober Quadrotor Impromptu Tracking with Neural Network
Quadrotor Impromptu Tracking with Neural Network IROS 2022 Safe Robot Learning Competition
IROS 2022 Safe Robot Learning Competition Safe Learning-based Control Using Gaussian Processes @ IFAC2020
Safe Learning-based Control Using Gaussian Processes @ IFAC2020 Optimal Geometry for Ultra-wideband Localization using Bayesian Optimization
Optimal Geometry for Ultra-wideband Localization using Bayesian Optimization Exploiting Differential Flatness for Robust Learning-Based Tracking Control using Gaussian Processes
Exploiting Differential Flatness for Robust Learning-Based Tracking Control using Gaussian Processes ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots
ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots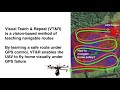 There's No Place Like Home: VT&R for Emergency Return of Multirotor UAVs During GPS Failure
There's No Place Like Home: VT&R for Emergency Return of Multirotor UAVs During GPS Failure A Data-Driven Motion Prior for Continuous-Time Trajectory Estimation on SE(3) @ICRA2020
A Data-Driven Motion Prior for Continuous-Time Trajectory Estimation on SE(3) @ICRA2020 Variational Inference with Parameter Learning Applied to Vehicle Trajectory Estimation
Variational Inference with Parameter Learning Applied to Vehicle Trajectory Estimation ICRA/RA-L 2022: Bridging the Model-Reality Gap with Lipschitz Network Adaptation
ICRA/RA-L 2022: Bridging the Model-Reality Gap with Lipschitz Network Adaptation CDC 2023 Workshop on Open-Source Code
CDC 2023 Workshop on Open-Source Code ICRA21: Meta Learning With Paired Forward and Inverse Models for Efficient Receding Horizon Control
ICRA21: Meta Learning With Paired Forward and Inverse Models for Efficient Receding Horizon Control Keep it Upright: Nonprehensile Object Transportation on a Mobile Manipulator
Keep it Upright: Nonprehensile Object Transportation on a Mobile Manipulator ICRA 2019: Multiagent Point-To-Point Transitions via Distributed Model Predictive Control
ICRA 2019: Multiagent Point-To-Point Transitions via Distributed Model Predictive Control Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation?
Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation? Force Push: Robust Single-Point Pushing with Force Feedback
Force Push: Robust Single-Point Pushing with Force Feedback IROS 2021 Safe Real-World Robot Autonomy Workshop Invited Spotlight Talks
IROS 2021 Safe Real-World Robot Autonomy Workshop Invited Spotlight Talks Hierarchical Motion Primitives for Motion Planning
Hierarchical Motion Primitives for Motion Planning