Brushed DC motor speed-torque curve (Kevin Lynch)
For more information, see http://nu32.org. This video is a supplement to the book "Embedded Computing and Mechatronics with the PIC32 Microcontroller," Lynch, Marchuk, and Elwin. It is part of Northwestern University's ME 333 Introduction to Mechatronics.
L-comp: Explain why the boundary between the continuous operating region and the intermittent operating region is a vertical line.
Видео Brushed DC motor speed-torque curve (Kevin Lynch) канала Northwestern Robotics
L-comp: Explain why the boundary between the continuous operating region and the intermittent operating region is a vertical line.
Видео Brushed DC motor speed-torque curve (Kevin Lynch) канала Northwestern Robotics
Показать
Комментарии отсутствуют
Информация о видео
Другие видео канала
 Brushed DC motor equations (Kevin Lynch)
Brushed DC motor equations (Kevin Lynch) Driving DC motors, part 1/3: Flyback diodes (Kevin Lynch)
Driving DC motors, part 1/3: Flyback diodes (Kevin Lynch) Power vs Torque - In Depth Explanation and Mythbusting!
Power vs Torque - In Depth Explanation and Mythbusting! A professional motor control system (Kevin Lynch)
A professional motor control system (Kevin Lynch) ME207 DC Motor Model Equation Derivation
ME207 DC Motor Model Equation Derivation Mechanical Power: Torque and Speed
Mechanical Power: Torque and Speed Brushless motor theory 01 - KV and torque efficiency
Brushless motor theory 01 - KV and torque efficiency DC motor electrical and mechanical power in the speed-torque plane (Kevin Lynch)
DC motor electrical and mechanical power in the speed-torque plane (Kevin Lynch) Motor production: Speed, Torque and Horsepower
Motor production: Speed, Torque and Horsepower DC motor output power (Kevin Lynch)
DC motor output power (Kevin Lynch) Driving DC motors, part 3/3: H-bridges (Kevin Lynch)
Driving DC motors, part 3/3: H-bridges (Kevin Lynch) Stepper Motors Advantages and Disadvantages
Stepper Motors Advantages and Disadvantages A DC motor data sheet (Kevin Lynch)
A DC motor data sheet (Kevin Lynch)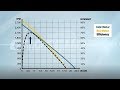 How to Choose an Electric Motor | DC Motors
How to Choose an Electric Motor | DC Motors The DC motor speed-torque plane (Kevin Lynch)
The DC motor speed-torque plane (Kevin Lynch) Intro to brushed permanent magnet DC motors, part 1/2 (Kevin Lynch)
Intro to brushed permanent magnet DC motors, part 1/2 (Kevin Lynch) A Torque Speed Example
A Torque Speed Example Intro to brushed permanent magnet DC motors, part 2/2 (Kevin Lynch)
Intro to brushed permanent magnet DC motors, part 2/2 (Kevin Lynch)