- Популярные видео
- Авто
- Видео-блоги
- ДТП, аварии
- Для маленьких
- Еда, напитки
- Животные
- Закон и право
- Знаменитости
- Игры
- Искусство
- Комедии
- Красота, мода
- Кулинария, рецепты
- Люди
- Мото
- Музыка
- Мультфильмы
- Наука, технологии
- Новости
- Образование
- Политика
- Праздники
- Приколы
- Природа
- Происшествия
- Путешествия
- Развлечения
- Ржач
- Семья
- Сериалы
- Спорт
- Стиль жизни
- ТВ передачи
- Танцы
- Технологии
- Товары
- Ужасы
- Фильмы
- Шоу-бизнес
- Юмор
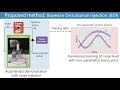
Autonomous Obstacle Removal for Excavators through Policy Learning with Particle Simulation
Paper Title: Autonomous Obstacle Removal for Excavators through Policy Learning with Particle Simulation
Authors: Yuki Kadokawa, Sandro M. Alcantara Tacora, Taro Abe, Daisuke Endo, Genki Yamauchi, Takeshi Hashimoto, Takamitsu Matsubara
Paper Link:
(arXiv) https://arxiv.org/pdf/2606.09183
Under review.
Видео Autonomous Obstacle Removal for Excavators through Policy Learning with Particle Simulation канала NAIST Robot Learning Lab
Authors: Yuki Kadokawa, Sandro M. Alcantara Tacora, Taro Abe, Daisuke Endo, Genki Yamauchi, Takeshi Hashimoto, Takamitsu Matsubara
Paper Link:
(arXiv) https://arxiv.org/pdf/2606.09183
Under review.
Видео Autonomous Obstacle Removal for Excavators through Policy Learning with Particle Simulation канала NAIST Robot Learning Lab
Комментарии отсутствуют
Информация о видео
9 июня 2026 г. 12:07:23
00:04:12
Другие видео канала